Projekt rozpracovává koncept použítí robotiky a inteligentních strojů ve stavebnictví a architektuře, která jak se v rámci rešerší ukázalo je robotikou 21. století v zásadě nepoznamenané.
Vrcholem aplikované robotiky v našem oboru jsou dnes výrobní stroje CNC nebo těžká stavební mechanika, u kterých je nutná bezprostřední přítomnost člověka. Přitom při bližším pohledu na vývoj v oblastech kybernetiky a robotiky, který se uskutečnil v posledních padesáti letech, není těžké vyjít z údivu nad tím, jaké schopnosti současní roboti mají.
Roboti mají zrak a čich, umějí rozpoznávat objekty, díky pokrokrům v mechanice se umějí obstojně pohybovat a jednotliví roboti spolu dokáží komunikovat a spolupracovat při samostatném řešení složitých problému.
Současné stavby trpí dlouhou dobou, kterou je nutno věnovat její přípravě a rovněž realizaci, která je navíc velmi logisticky energeticky náročná. Výsledná stavba, která je vždy unikátním prototypem je při vší snaze vždy rigidním tělesem, které je jen velmi omezeně schopno reagovat na změnu vnějších podmínek nebo na změnu přání či potřeb jejich uživatelů.
Fyzická životnost těchto staveb je ovšem značná. Stavby se běžně plánují na padesát let, ale kůli nedostatku prostředků a výše finančních nákladů na jejich přestavbu či odstranění přetrvávají nevyhovující stavby mnohem déle.
Obvzláště s ohledem na fakt, že posledních patnáct let čelí lidstvo projevům globálních klimatický změn, které ať už vinou člověka či ne, ztěžují lidem zejména v některých oblastech světa plánovat s jistotou a efektivitou do budoucnosti.
Stavebnictví a architektura musí projevit ambici se s těmito fakty vyrovnat a čelit jim a právě použití inteligentních robotů nabízí možné východisko.
Nelze si představovat, že tento nový směr zcela nahradí tradiční stavitelství. Má ale potenciál ho doplnit v oblastech kde pokulhává či je neefektivní.
Takouvou oblastí jsou zejména dočasné stavby a stavby, které je nutné navrhovat do ne zcela známých podmínek.
V době kdy jsou přírodní katastrofy schopny opakovaně ničit životně důložitou infrastrukturu na rozsáhlých plochách, jejíž bezprostřední obnovení je otákou řady let. V okamžiku kdy valečné konflity vyvolávají masové přesuny techniky, vojska a civilního obyvatelstva do míst bez dostatečného zázemí. A v době kdy lidstvo začíná spojovat svou budoucnoust s prostorem a zdroji mimo naši planetu. Nabívá tématika dočasných a samostavitelných budov velkého významu a její zvládnutí může vést ke značné úspoře prostředků a rozšíření lidkých možnosti.
MODEL 1.0
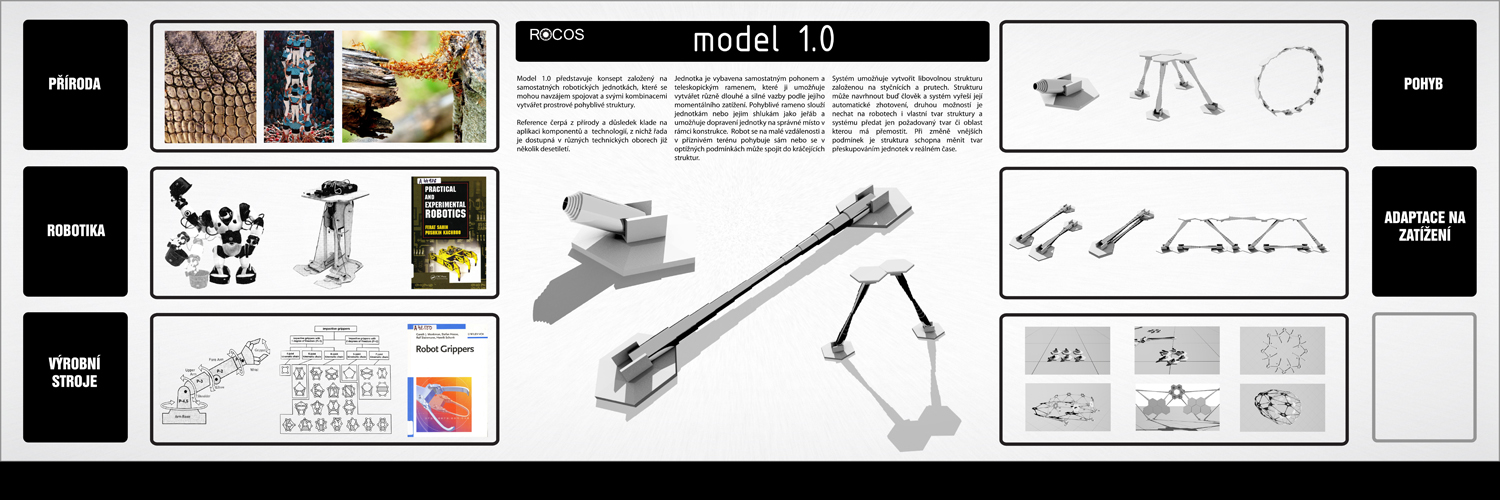
Model 1.0 představuje koncept založený na samostatných robotických jednotkách, které se mohou navzájem spojovat a svými kombinacemi vytvářet prostrové pohyblivé struktury.
Reference čerpá z přírody a důsledek klade na aplikaci komponentů a technologií, z nichž řada je dostupná v různých technických oborech již několik desetiletí.
Jednotka je vybavena samostatným pohonem a teleskopickým ramenem, které ji umožňuje vytvářet různě dlouhé a silné vazby podle jejího momentálního zatížení. Pohyblivé rameno slouží jednotkám nebo jejim shlukám jako jeřáb a umožňuje dopravení jednotky na správné místo v rámci konstrukce. Robot se na malé vzdálenosti a v příznivém terénu pohybuje sám nebo se v optížných podmínkách může spojit do kráčejících struktur.
Systém umožňuje vytvořit libovolnou strukturu založenou na styčnících a prutech. Strukturu může navrhnout buď člověk a systém vyřeší její automatické zhotovení, druhou možností je nechat na robotech i vlastní tvar struktury a systému předat jen požadovaný tvar či oblast kterou má přemostit. Při změně vnějších podmínek je struktura schopna měnit tvar přeskupováním jednotek v reálném čase.
MODEL 2.0
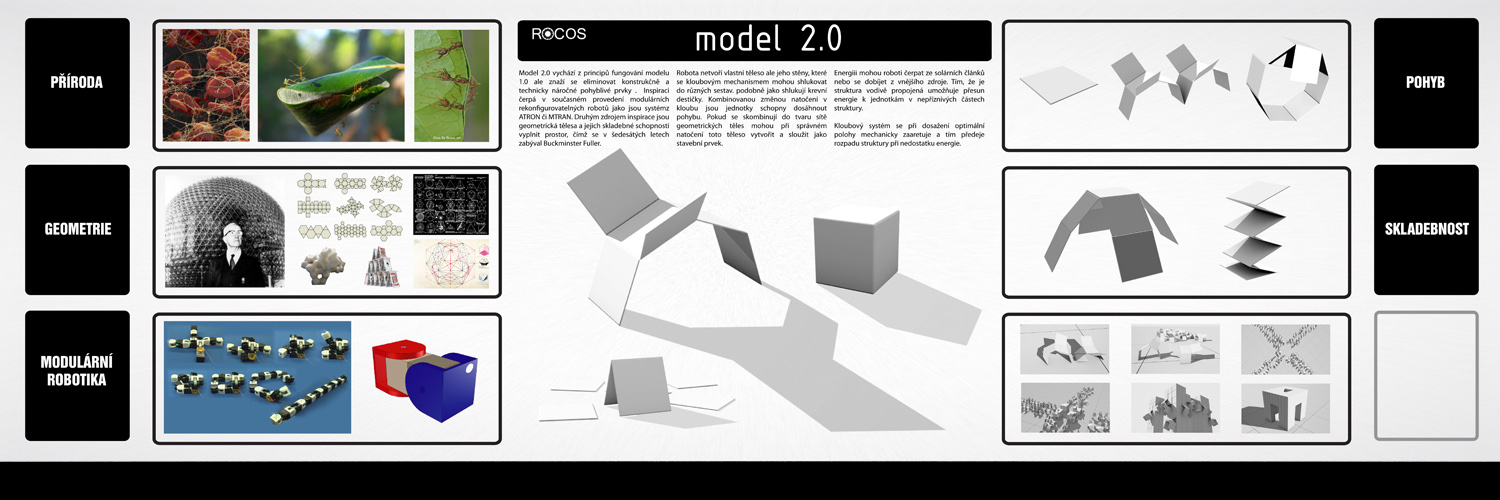
Model 2.0 vychází z principů fungování modelu 1.0 ale znaží se eliminovat konstrukčně a technicky náročné pohyblivé prvky . Inspiraci čerpá v současném provedení modulárních rekonfigurovatelných robotů jako jsou systémz ATRON či MTRAN. Druhým zdrojem inspirace jsou geometrická tělesa a jejich skladebné schopnosti vyplnit prostor, čímž se v šedesátých letech zabýval Buckminster Fuller.
Robota netvoří vlastní těleso ale jeho stěny, které se kloubovým mechanismem mohou shlukovat do různých sestav. podobně jako shlukují krevní destičky. Kombinovanou změnou natočení v kloubu jsou jednotky schopny dosáhnout pohybu. Pokud se skombinují do tvaru sítě geometrických těles mohou při správném natočení toto těleso vytvořit a sloužit jako stavební prvek.
Energiii mohou roboti čerpat ze solárních článků nebo se dobíjet z vnějšího zdroje. Tím, že je struktura vodivě propojená umožňuje přesun energie k jednotkám v nepříznivých částech struktury.
Kloubový systém se při dosažení optimální polohy mechanicky zaaretuje a tím předeje rozpadu struktury při nedostatku energie.