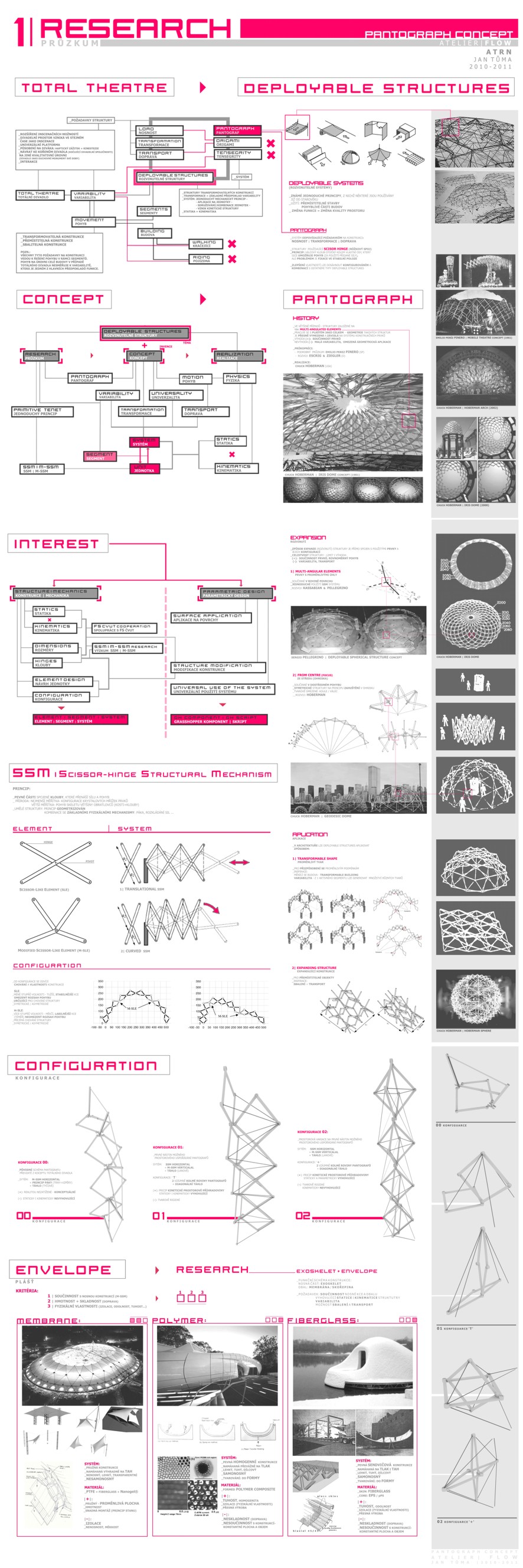
CONCEPT
_based on previous concept (Total Theatre) from which ensue the request of a packable, transportable structure with universal use.
_project is focused on the exo-skeleton and the envelope.
_as a main idea of the structural solution remains 'Pantopgraph Concept' or more precisely- SSM (Scissor-hinge Structural Mechanism)
PROCESS
1.0 | RESEARCH
_in the mark of Deployable Structures foremost SSM structures are explored; their evolution, aplication, configuration...
_different behaviour of SSM and M-SSM elements and their combination is crucial for intelligence the whole structure operation.
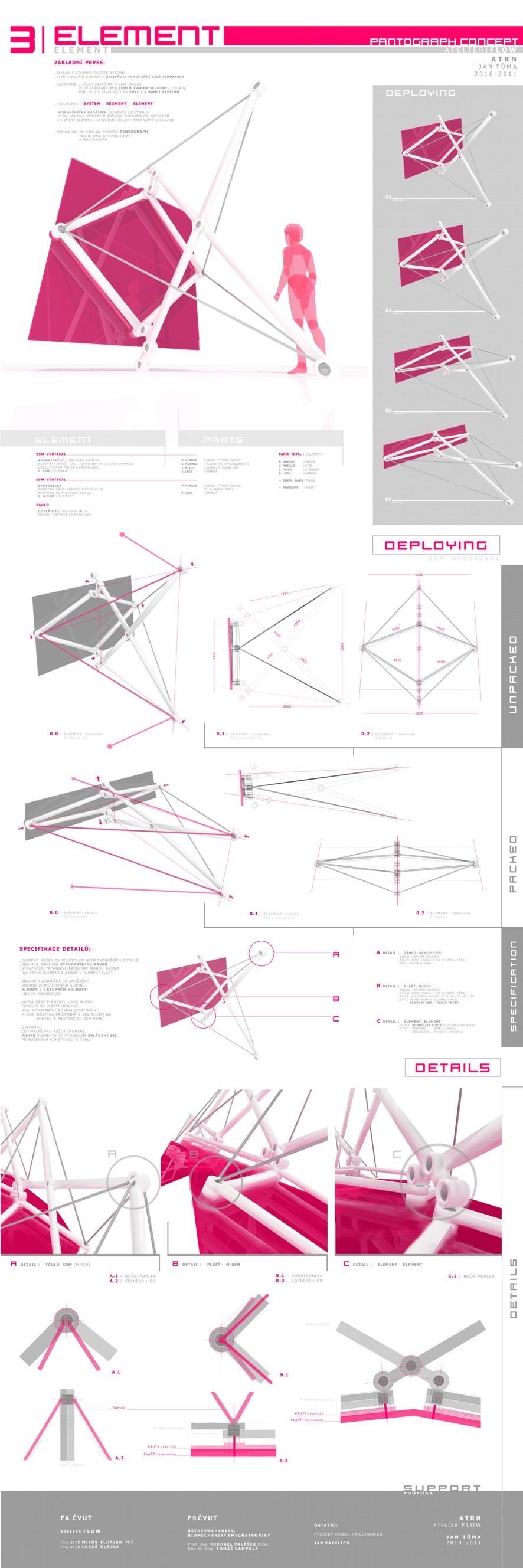
_from the research comes out, that so far has existed in SSM systems just hierarchy: SYSTEM - ELEMENT (connection of cooperating elements in one determinated, exactly defined volume). another of the works' objectives is an use extension of this structures by modification of hierarchy to: SYSTEM - SEGMENT - ELEMENT (elements are connected into working segment. the final volume is created by multiplication and combination of the segments). this configuration is also better for transport.
_from the research results the BRANCHES OF INTEREST:
1 | MECHANICS
2 | PARAMETRICS
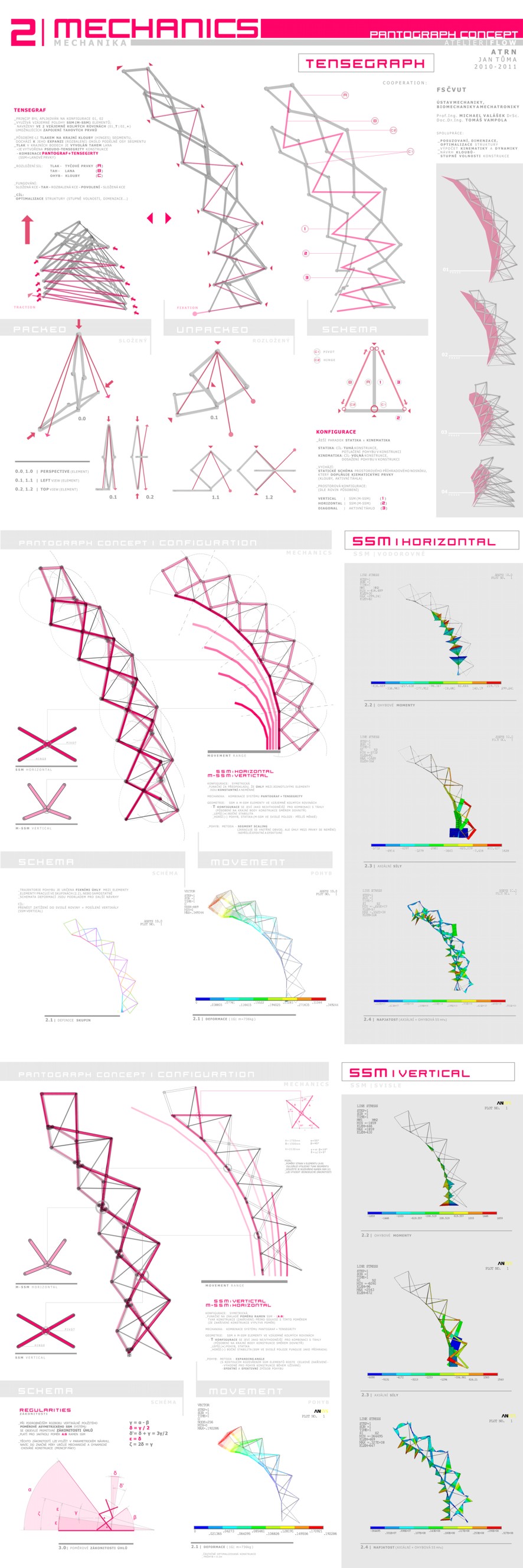
1.1 | MECHANICS
_character of the structure combines statics and dynamics, which lead to paradox:
STATICS - objective: rigid structure - minimal movement (packed/unpacked)
DYNAMICS - objective: flexible structure - maximal movement (packing/unpacking)
_this paradox is solved by configuration:
TENSEGRAPH:
_new solution, combining pantograph system (SSM) with tensegrity
_configuration: SSM (2 perpendicular planes)
draw rods (diagonal)
_static configuration: works principaly like a 3D truss girder
_dynamic configuration: chaining the units (the forces and movement is linearly distributed)
_forces transmision: deflexion - hinges, pivots | compression - bars | tension - draw rods
_particular configurations were tested in cooperation with FS ČVUT (institute of mechanics and mechatronics).
following the appraisals the most efficient version has been chosen-
configuration: SSM- vertical | M-SSM- horizontal | draw rods- diagonal (this system has been further upgraded and optimalised)
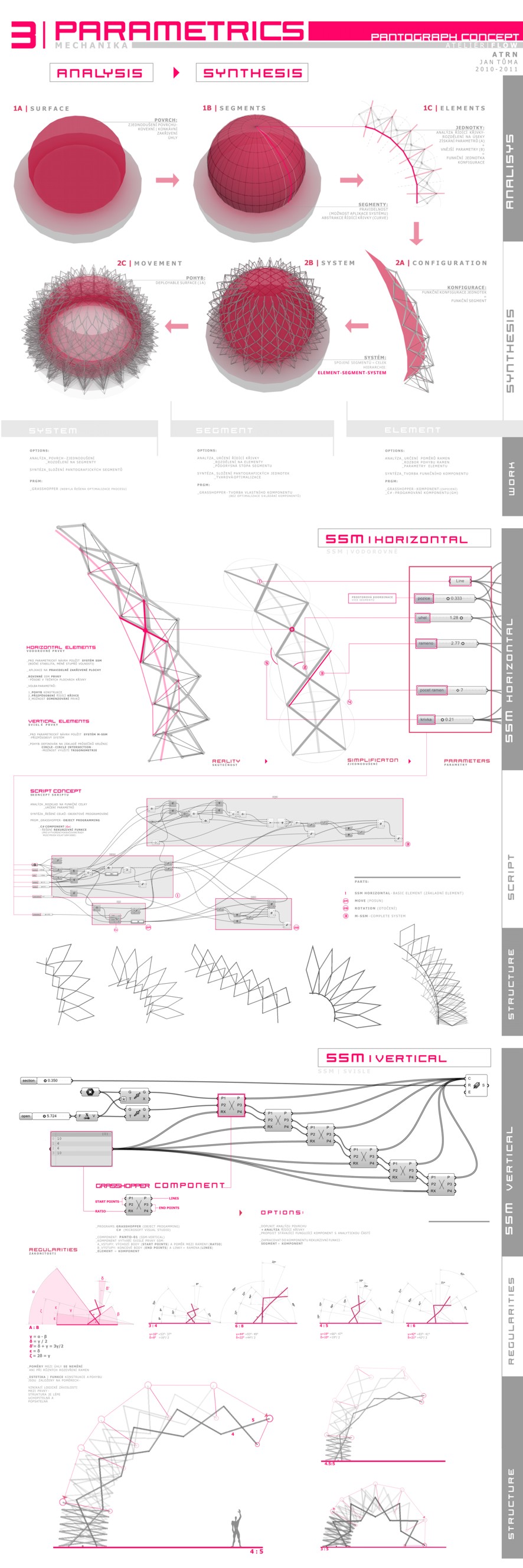
1.2 | PARAMETRICS
_programs:
Rhino - GrassHopper
C# editor
_the objective is automated parametric designing and dimensioning 3D SSM structures. Structure can be used for (relatively) random surface which afford opportunity of universal use.
_based on analytic-synthetic process of designing:
surface - division into segments - control curve of each segment - analysis of the control curves - SSM units design (based on previous analysis) - connection of the all kinematic segments back into the orgiginal surface (which is deployable).
_evolution:
1. object scripting: clasic GrassHopper script
2. GH component: creation of the special component for GrassHopper which designs SSM units by use of particular lenght ratio.
The movement is solved as a circle-circle intersection (+real movement simulation by Kangaroo plug-in).
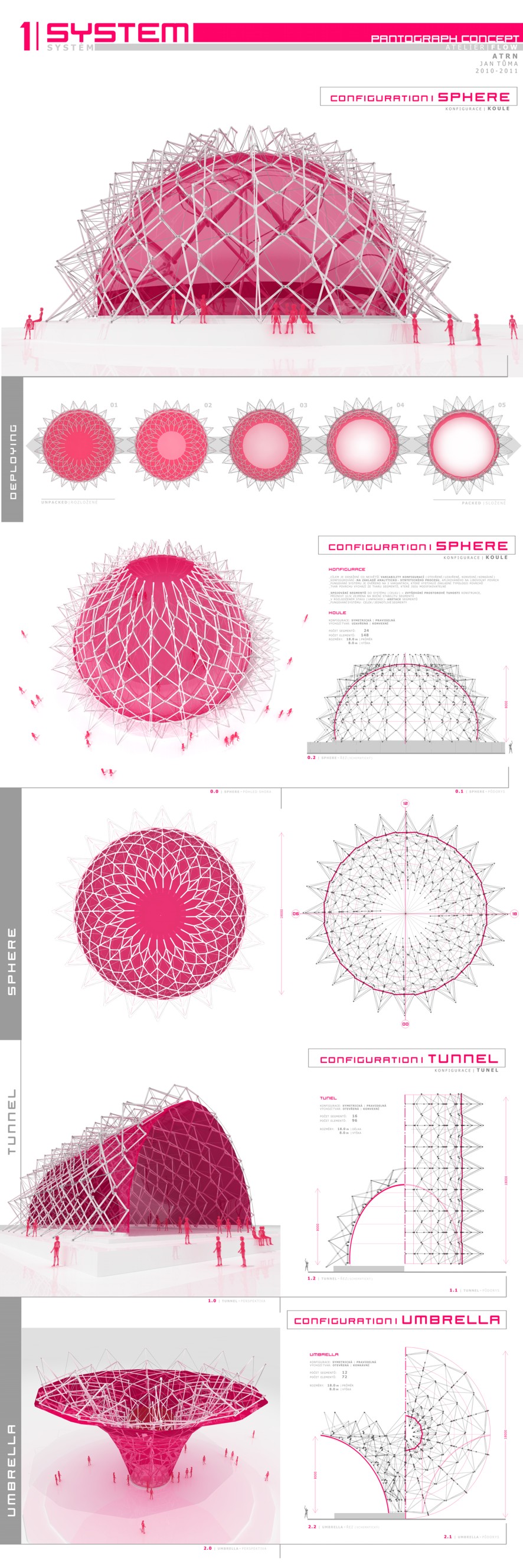
FINAL
_results of the process
_demonstration of a few posibilities of the solution
_acording the appraisals proves, that hierarchy SYSTEM | SEGMENT | ELEMENT by use of TENSEGRAPH configuration is working and also corespond to static and dynamic requests.
2.0 SYSTEM
_3 basic options of the system configuration: sphere | tunnel | umbrella
_the movement posibilities have been proved for each of variants
2.1. SEGMENT
_exemplary segment with calculed dimensions and conceptual actuation solution
_segment itself is rigid enough; practical use envisage lock the segments in the unpacked position.
structure also can be working during the perfonce.
2.2. ELEMENT
_behaviour of the unit is crucial for the qualities of the whole structure
_pursuit the most simple solution
_reach the optimal count degrees of freedom, optimal shape and profilation