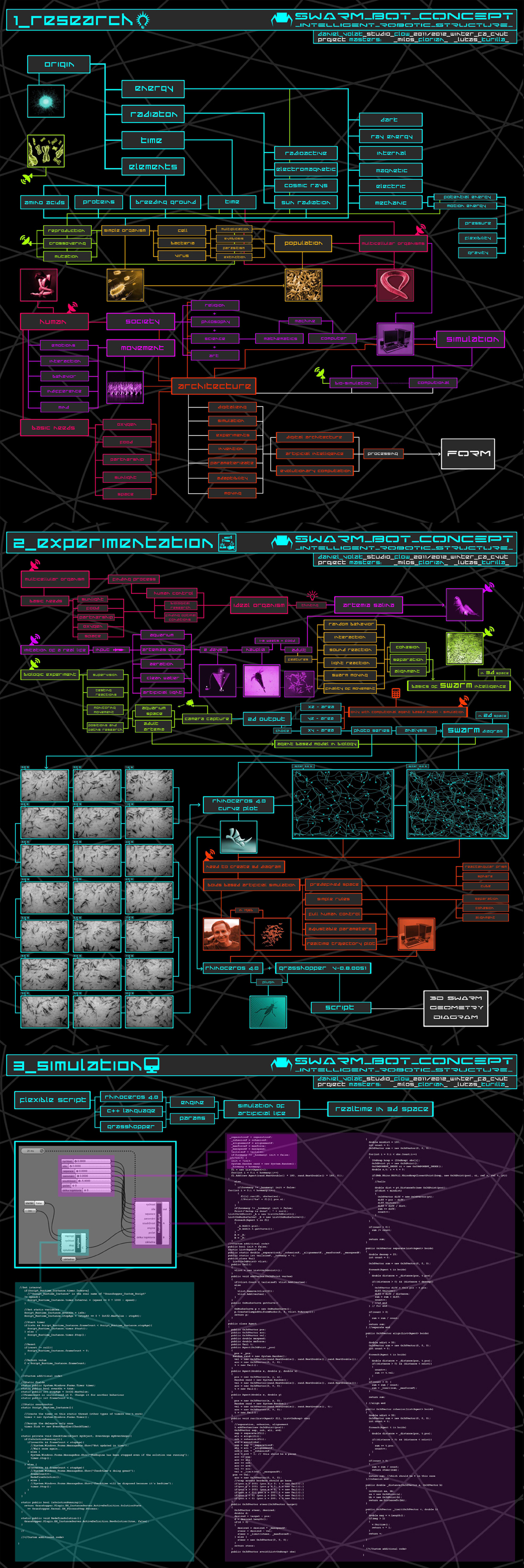
Projekt se zabývá inteligentní automatizací řízení a robotizací modulárních pohyblivých jednotek v čase a prostoru za účelem vytvoření dočasných či trvale obyvatelných prostorů, systémy umožňující samokonstrukci objektu.
V první (výzkumné) fázi projektu se formou diagramu zabývám vývojem organismů a jejich potřeb z hlediska časové linie a aplikací těchto potřeb na dnešní a budoucí formu architektury. Architektura má být inteligentní, digitální, adaptibilní, samokonstruovatelná a být počítačově testována a simulována.
Dále vznikla potřeba vytvoření nástroje pro centrální ovládání jednotek a jejich prostorových konfigurací. Pomocí jazyku C# byl vytvořen program na simulaci pohybu jednotek. Program v podobě textu byl importován do softwaru Grasshopper V-0.8.0051, který je pluginem pro software Rhinoceros 4.0, čímž byla umožněna grafická interpretace pohybu a konfigurací jednotek v reálném čase.
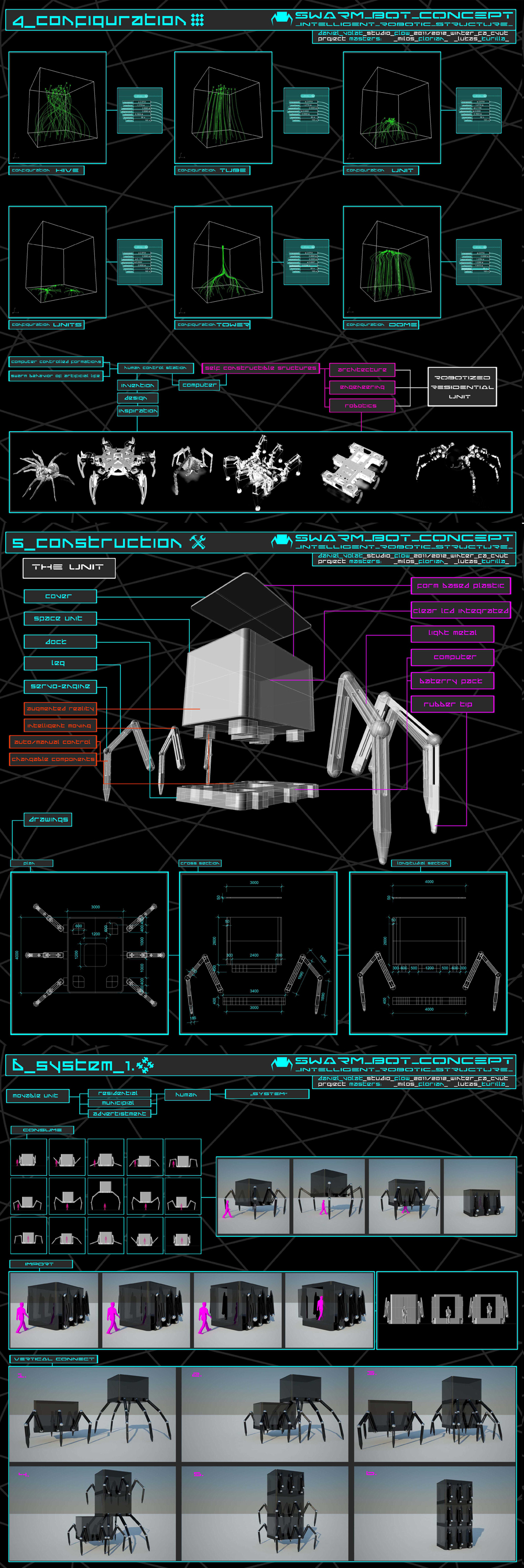
V pozdější fázi projektu řeším samotnou hmotnou konstrukci modulárních jednotek. Robotizovaná jednotka se skládá se samotného prostoru, tzv. buňky, horního krytu, sporního krytu, tzv. docku a třech párů pohyblivých končetin.
Dock obsahuje počítač, akumulátory, konektory pro napájení a TZB. Samotná buňka je tvořena z formovaného vysokopevnostního plastu s integrovaným průhledným LCD displejem po celém svém povrchu, schopným zatmavovat či zesvětlovat povrch v jakékoliv části povrchu buňky a také projekce multimédií a rozšířené reality. Interiér buňky je variabilní a je schopen být osazen bežnými zařizovacími předměty.
Samotná jednotka je pro člověka přístupná jak horizontálně, tak vertikálně pomocí elektronicky ovládaných otvorů. Jednotka je schopna pohybu díky hexapodálnímu systému končetin s integrovanými servomotory, mající dostatek síly pro horizontální pohyb a potřeby únosnosti.
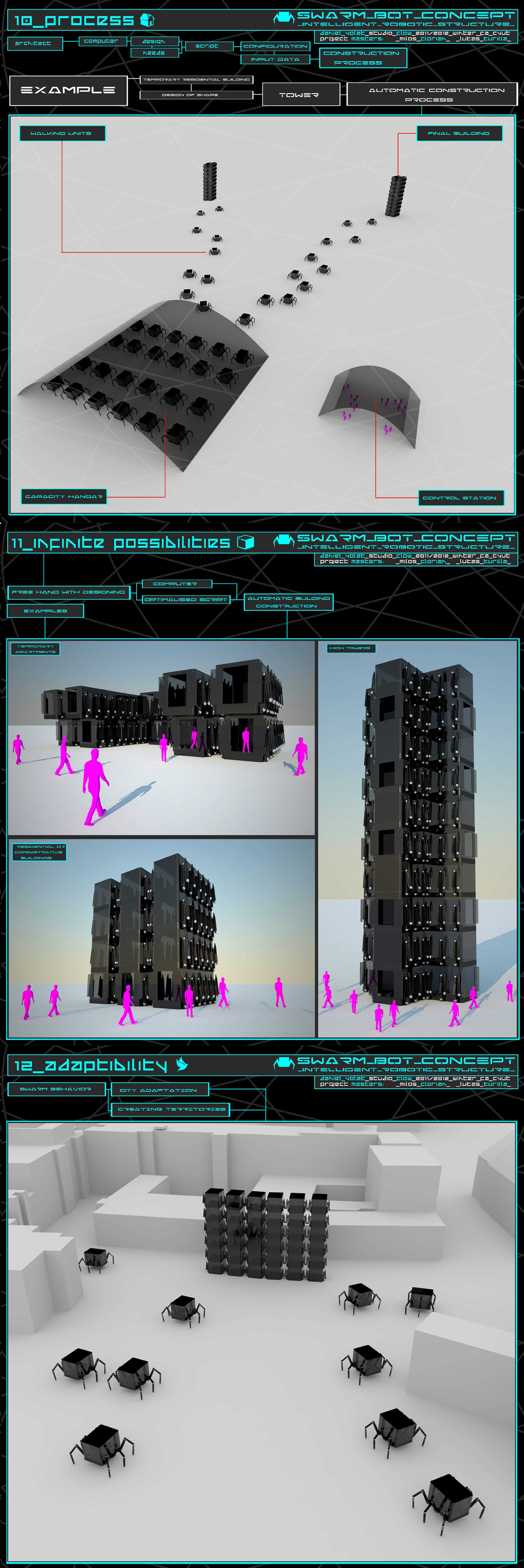
Jednotky jsou schopny inteligentní vzájemné interakce a konektivity horizontální či vertikální, potřebné pro vytváření složitějších struktur, dočasných či trvale obyvatelných.