POPIS PROCESU KONSTRUKCE
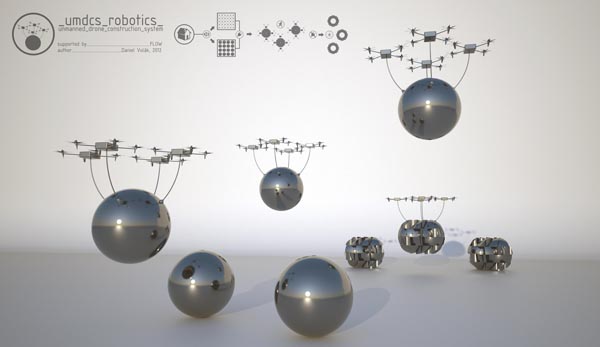
_bezpilotní kvadrikoptéra je určena k přenosu lehkých konstukčních systémů, nebo rozvinutelných struktur na danou lokaci a vzdálenost
_stabilitu letu a funkce udržuje řada automatických systémů řízených počítačem, aplikovaných na pohonnou jednotku
_zajištěna automatická výstavba a přenos materiálů
_maximální snížení rizika lidského faktoru
_použití zejména pro armádní, vesmírné, nebo akutní účely rychlé výstavby v normálních i extrémních podmínkách
_model dronu v micro měřítku je plně funkční, letuschopný robotický stroj - v macro měřítku je třeba použít jiné měřítko pohonných jednotek a akumulátorů
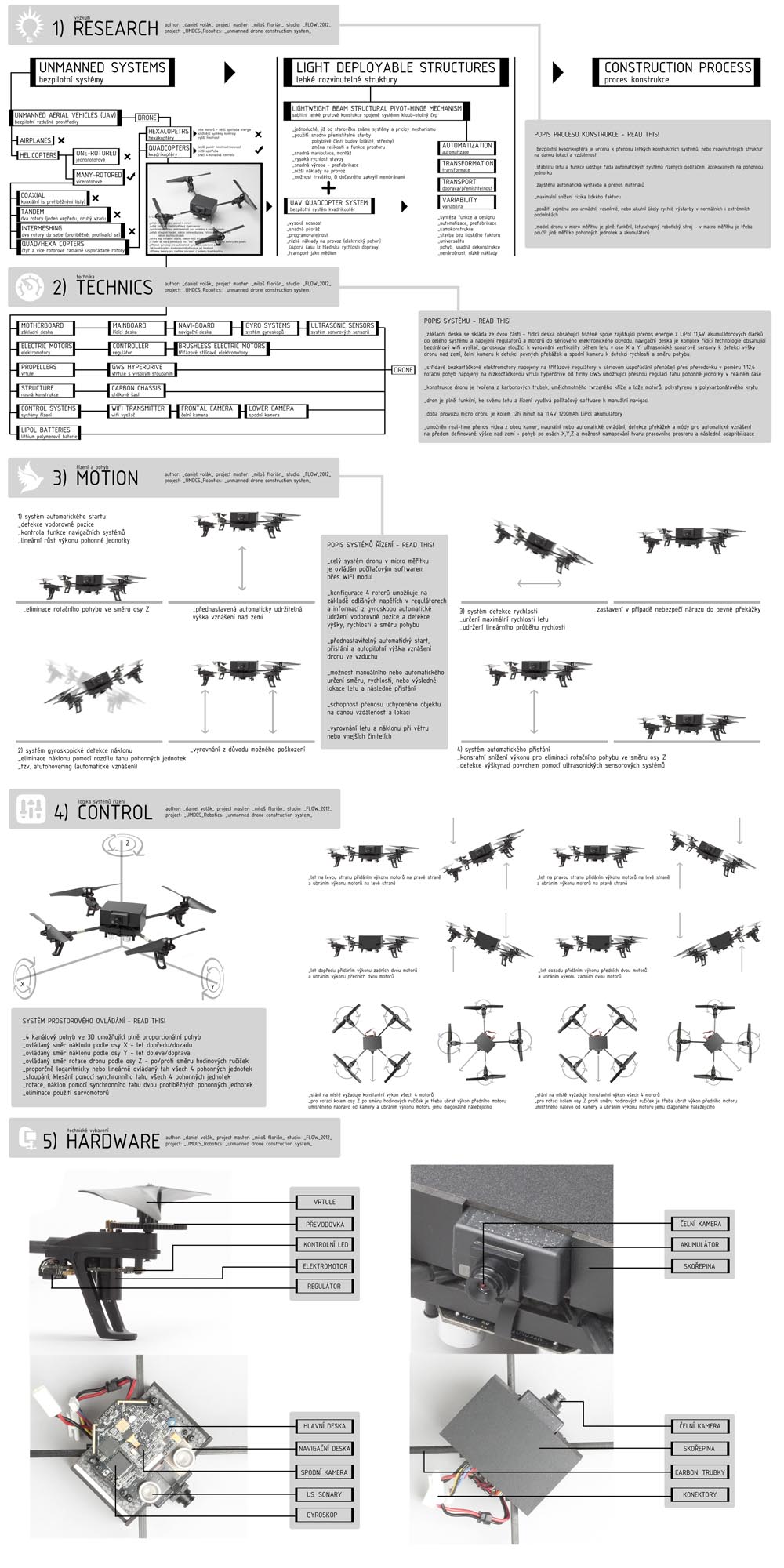
POPIS SYSTÉMU
_základní deska se skládá ze dvou částí - řídící deska obsahující tištěné spoje zajištující přenos energie z LiPol 11,4V akumulátorových článků do celého systému a napojení regulátorů a motorů do sériového elektronického obvodu. Navigační deska je komplex řídící technologie obsahující bezdrátový wifi vysílač, gyroskopy sloužící k vyrovnání vertikality během letu v ose X a Y, ultrasonické sonarové sensory k detekci výšky dronu nad zemí, čelní kameru k detekci pevných překážek a spodní kameru k detekci rychlosti a směru pohybu.
_střídavé bezkartáčkové elektromotory napojeny na třífázové regulátory v sériovém uspořádání přenášejí přes převodovku v poměru 1:12.6 rotační pohyb napojený na nízkootáčkovou vrtuli hyperdrive od firmy GWS umožnující přesnou regulaci tahu pohonné jednotky v reálném čase
_konstrukce dronu je tvořena z karbonových trubek, umělohmotného tvrzeného kříže a lože motorů, polystyrenu a polykarbonátového krytu
_dron je plně funkční, ke svému letu a řízení využívá počítačový software k manuální navigaci
_doba provozu micro dronu je kolem 12ti minut na 11,4V 1200mAh LiPol akumulátory
_umožněn real-time přenos videa z obou kamer, manuální nebo automatické ovládání, detekce překážek a módy pro automatické vznášení na předem definované výšce nad zemí + pohyb po osách X,Y,Z a možnost namapování tvaru pracovního prostoru a následné adaptibilizace
POPIS SYSTÉMŮ ŘÍZENÍ
_celý systém dronu v micro měřítku je ovládán počítačovým softwarem přes WIFI modul
_konfigurace 4 rotorů umožňuje na základě odlišných napětích v regulátorech a informací z gyroskopu automatické udržení vodorovné pozice a detekce výšky, rychlosti a směru pohybu
_přednastavitelný automatický start, přistání a autopilotní výška vznášení dronu ve vzduchu
_možnost manuálního nebo automatického určení směru, rychlosti, nebo výsledné lokace letu a následné přistání
_schopnost přenosu uchyceného objektu na danou vzdálenost a lokaci
_vyrovnání letu a náklonu při větru nebo vnějších činitelích
SYSTÉM PROSTOROVÉHO OVLÁDÁNÍ
_4 kanálový pohyb ve 3D umožňující plně proporcionální pohyb
_ovládaný směr náklonu podle osy X - let dopředu/dozadu _ovládaný směr náklonu podle osy Y - let doleva/doprava
_ovládaný směr rotace dronu podle osy Z - po/proti směru hodinových ručiček
_proporčně logaritmicky nebo lineárně ovládaný tah všech 4 pohonných jednotek
_stoupání, klesání pomocí synchronního tahu všech 4 pohonných jednotek
_rotace, náklon pomocí synchronního tahu dvou protiběžných pohonných jednotek
_eliminace použití servomotorů
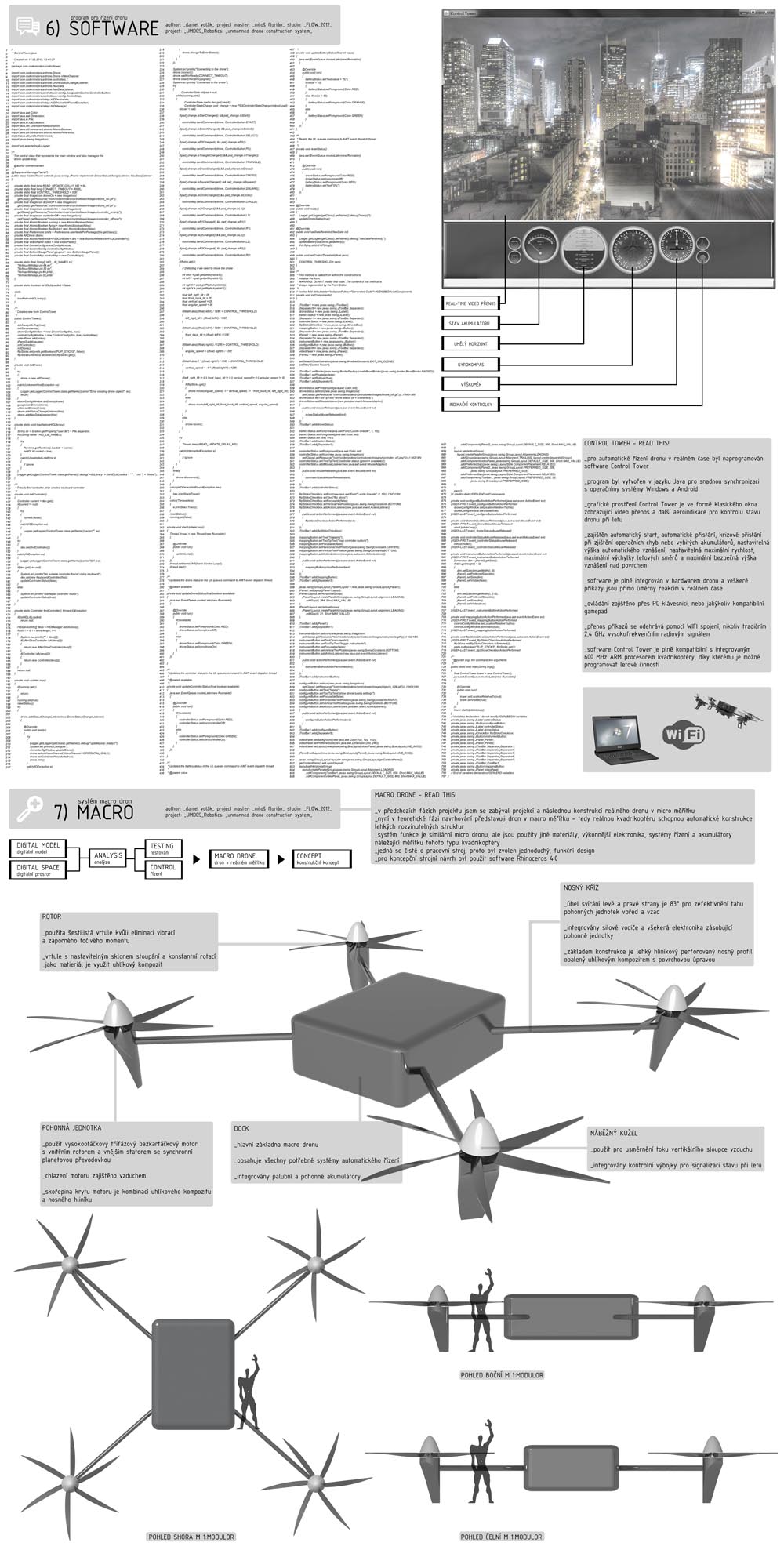
CONTROL TOWER
_pro automatické řízení dronu v reálném čase byl naprogramován software Control Tower
_program byl vytvořen v jazyku Java pro snadnou synchronizaci s operačními systémy Windows a Android
_grafické prostření Control Tower je ve formě klasického okna zobrazující video přenos a další aeroindikace pro kontrolu stavu dronu při letu
_zajištěn automatický start, automatické přistání, krizové přistání při zjištění operačních chyb nebo vybitých akumulátorů, nastavitelná výška automatického vznášení, nastavitelná maximální rychlost, maximální výchylky letových směrů a maximální bezpečná výška vznášení nad povrchem
_software je plně integrován v hardwarem dronu a veškeré příkazy jsou přímo úměrný reakcím v reálném čase
_ovládání zajištěno přes PC klávesnici, nebo jakýkoliv kompatibilní gamepad
_přenos příkazů se odehrává pomocí WIFI spojení, nikoliv tradičním 2,4 GHz vysokofrekvenčním radiovým signálem
_software Control Tower je plně kompatibilní s integrovaným 600 MHz ARM procesorem kvadrikoptéry, díky kterému je možné programovat letové činnosti
MACRO DRONE
_v předchozích fázích projektu jsem se zabýval projekcí a následnou konstrukcí reálného dronu v micro měřítku
_nyní v teoretické fázi navrhování představuji dron v macro měřítku - tedy reálnou kvadrikoptéru schopnou automatické konstrukce lehkých rozvinutelných struktur
_systém funkce je similární micro dronu, ale jsou použity jiné materiály, výkonnější elektronika, systémy řízení a akumulátory náležející měřítku tohoto typu kvadrikoptéry
_jedná se čistě o pracovní stroj, proto byl zvolen jednoduchý, funkční design
_pro koncepční strojní návrh byl použit software Rhinoceros 4.0
DOCK
_hlavní základna macro dronu
_obsahuje všechny potřebné systémy automatického řízení
_integrovány palubní a pohonné akumulátory
POHONNÁ JEDNOTKA
_použit vysokootáčkový třífázový bezkartáčkový motor s vnitřním rotorem a vnějším statorem se synchronní planetovou převodovkou
_chlazení motoru zajištěno vzduchem
_skořepina krytu motoru je kombinací uhlíkového kompozitu a nosného hliníku
NOSNÝ KŘÍŽ
_úhel svírání levé a pravé strany je 83° pro zefektivnění tahu pohonných jednotek vpřed a vzad
_integrovány silové vodiče a veškerá elektronika zásobující pohonné jednotky
_základem konstrukce je lehký hliníkový perforovaný nosný profil obalený uhlíkovým kompozitem s povrchovou úpravou
NÁBĚŽNÝ KUŽEL
_použit pro usměrnění toku vertikálního sloupce vzduchu
_integrovány kontrolní výbojky pro signalizaci stavu při letu
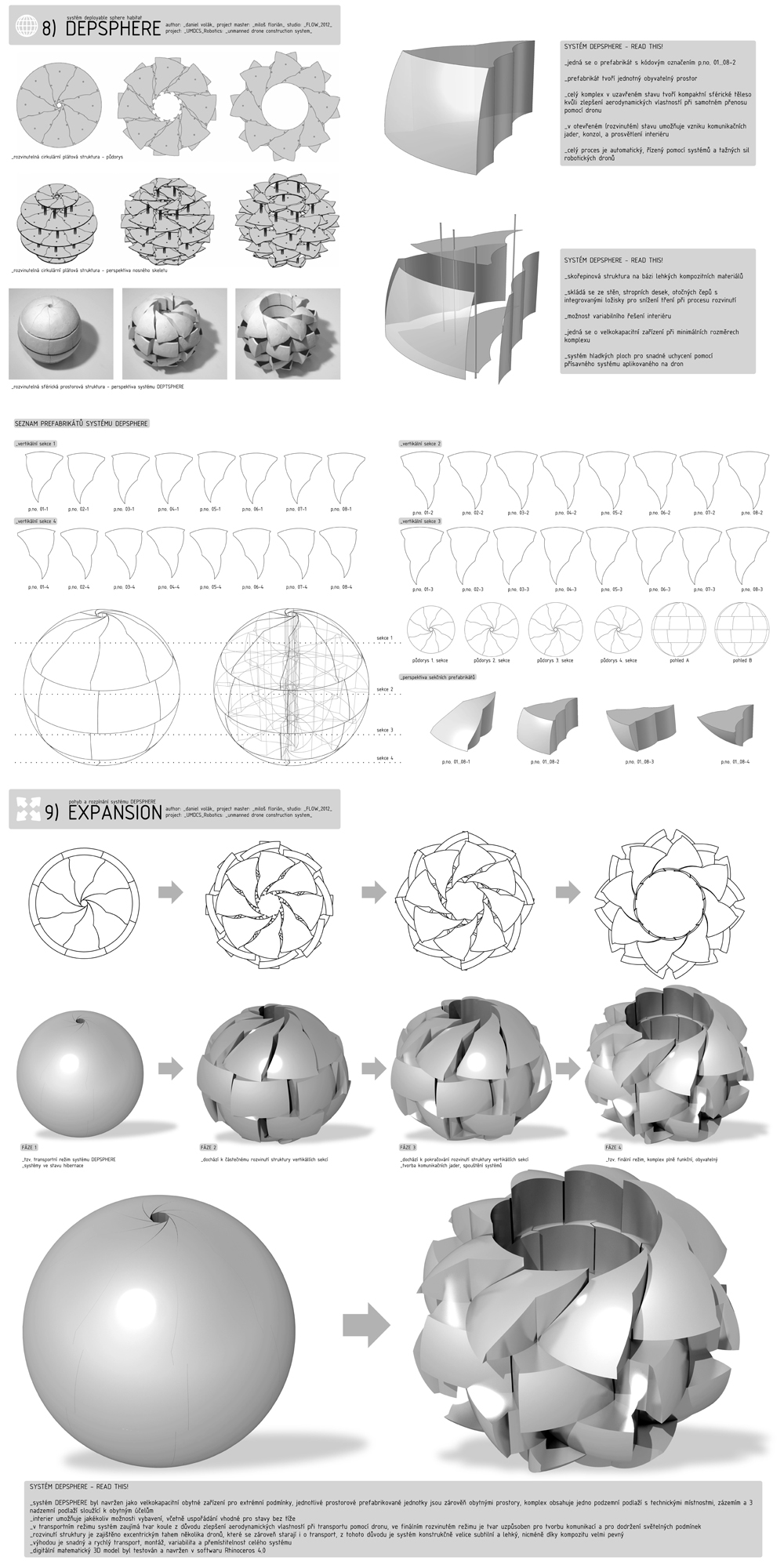
SYSTÉM DEPSPHERE
_jedná se o prefabrikát s kódovým označením p.no. 01...08-2
_prefabrikát tvoří jednotný obyvatelný prostor
_celý komplex v uzavřeném stavu tvoří kompaktní sférické těleso kvůli zlepšení aerodynamických vlastností při samotném přenosu pomocí dronu
_v otevřeném (rozvinutém) stavu umožňuje vzniku komunikačních jader, konzol a prosvětlení interiéru
_celý proces je automatický, řízený pomocí systémů a tažných sil robotických dronů
SYSTÉM DEPSPHERE
_skořepinová struktura na bázi lehkých kompozitních materiálů
_skládá se ze stěn, stropních desek, otočných čepů s integrovanými ložisky pro snížení tření při procesu rozvinutí
_možnost variabilního řešení interiéru
_jedná se o velkokapacitní zařízení při minimálních rozměrech komplexu
_systém hladkých ploch pro snadné uchycení pomocí přísavného systému aplikovaného na dron
SYSTÉM DEPSPHERE
_systém DEPSPHERE byl navržen jako velkokapacitní obytné zařízení pro extrémní podmínky, jednotlivé prostorové prefabrikované jednotky jsou zárověň obytnými prostory, komplex obsahuje jedno podzemní podlaží s technickými místnostmi, zázemím a 3 nadzemní podlaží sloužící k obytným účelům
_interier umožňuje jakékoliv možnosti vybavení, včetně uspořádání vhodné pro stavy bez tíže
_v transportním režimu systém zaujímá tvar koule z důvodu zlepšení aerodynamických vlastností při transportu pomocí dronu, ve finálním rozvinutém režimu je tvar uzpůsoben pro tvorbu komunikací a pro dodržení světelných podmínek
_rozvinutí struktury je zajištěno excentrickým tahem několika dronů, které se zároveň starají i o transport, z tohoto důvodu je systém konstrukčně velice subtilní a lehký, nicméně díky kompozitu velmi pevný
_výhodou je snadný a rychlý transport, montáž, variabilita a přemístitelnost celého systému
_digitální matematický 3D model byl testován a navržen v softwaru Rhinoceros 4.0
SYNTÉZA
_tvar koule systému DEPSPHERE má odpovídající technické a aerodynamické požadavky pro použití se systémem macro dron
_váha konstrukce je uzpůsobena tak,že na její přenesení a rozvinutí je třeba 4 dronů
_jeden systém DEPSPHERE obsahuje 32 obyvatelných jednotek
_po rozvinutí pomocí excentrického tahu dronů je zajištěna statická stabilita celé konstrukce + využítí kotev
TRANSPORTNÍ REŽIM
_struktura ve složené fázi
_dochází k letovému transportu za pomocí dronů
_dron je přichycen k systému DEPSPHERE pomocí flexibilního robotického ramena "gripper" obsahují vakuovou technologii (přísavka)
FÁZE 1
_přeprava komplexu pomocí dronů
_dochází k cyklickému přichycení na hladký povrch DEPSPHERE vakuovým přisátím gripperu
FÁZE 2
_ukončení transportu DEPSPHERE
_ve vzduchu dochází k excentrickému tahu dronů a tím je zajištěno rozvinutí systému
FINÁLNÍ REŽIM
_struktura v rozvinuté fázi
_ukončení letového transportu, výběr vhodného místa pro ukotvení k zemi
_snížení tlaku v gripperu, odsátí přísavky _drony se vracejí na základnu, dobijí akumulátory + servis