1,Chování Fagocyt -mikroorganismus schopných pohlcovat pevné částice z okolního prostředí.
2,Dělení Eukaryotické a prokaryotické buňky.
3,Replikace Eukaryotické a prokaryotické buňky, 3d tiskárna, replikátor EBF3.
4,Způsob čištění Bio-cleaner - koncept Korejce Hsu Seana, zabývající se likvidací ropných havárií. pomocí robotů používajících energii mořských vln a biodegradaci..
Inspirace-finální struktura
1,Příroda Mravenci, kteří pomocí zaklesnutí nohou jsou schopni přežít pokus se ocitnou ve vodě, medové plástve, fulereny, mimořádně odolné molekuly tvořené atomy uhlíku.
2,Langtonovy smyčky zjednodušená verze 2d celulárního automatu, v tomto případě by roboti nevyhledávali odpad ,ale odpad by byl přisouván k místě finální struktury , která by rostla podle schématu langtonových smyček.
3,Polyomino rovina vznikající spojením jednoho nebo více čtverců , asi nejjednodušší způsob pro vytváření finální platformy.
4,Motein programovatelná univerzálně skládací struna, která je schopna vytvořit 2d i 3d tvar. V mé práci by byla vhodná k sestavování finální platformy, která by se byla schopna zmorfovat např. do tvaru protipovodňové hráze.
Inspirace-způsob vyhledávání
1,Boids
Model pracuje s agenty reprezentovanými směrovým vektorem, znalostí rozmístění ostatních agentů v daném okruhu a možností pohybu ve dvou či třech rozměrech. Mohou být omezeni různými parametry jako je minimální vzdálenost mezi dvěma agenty či maximální možný úhel otočení pro jednotlivá pravidla řídící pohyb. Hodnoty těchto parametrů pak ovlivňují plynulost pohybu, soudržnost hejna a celkově výsledný vzhled při simulaci.
V mé práci je tato simulace zásadní, jelikož z ní vyhází chování celého hejna robotů. Model Boids je však rozšířen o rozmnožování, růst, náhodný pohyb a tvorbu finální "stavby".
2,Ants colony
logoritmus používá při výpočtu množinu agentů, mravenců. Hlavním znakem algoritmu je komunikace jednotlivých agentů skrze prostředí. Zde lze právě spatřit podobnost se skutečnými mravenci, kteří zanechávají feromonovou stopu na cestě k nalezené potravě. Právě takto nacházejí mravenci nejkratší cestu k potravě, protože čím delší cesta, tím rychleji pachová stopa vyprchá a stopa na kratší cestě převáží. Feromonová stopa pak slouží jako druh pozitivní zpětné vazby. Mravenec se s vyšší pravděpodobností rozhoduje pro cestu se silnější stopou.
3,Wolf sheep predation
Model wolf sheep predation zkoumá stabilitu ekosystému tvořeného lovcem a jeho kořistí na populacích vlků a ovcí. Nestabilním systémem nazýváme takový, který má tendenci vyústit ve vyhynutí jednoho nebo více uvažovaných živočišných druhů. Naopak stabilní systém je ten, který je v průběhu času schopen udržovat sám sebe i navzdory kolísání ve velikosti populací.
V mé práci se tento systém vyskytl v úvahách o optimalizaci počtu robotů. Například pokud by se přemnožili roboti , neměli by co pojídat, tudíš by jim došla energie a kolonie by zašla.
Způsob rozeznávání odpadu
SLAM
Každý robot je vybaven touto technologií, která dokáže v reálném čase mapovat okolí.
Jelikož se v místech odpadu, které jsou definovány přes satelitní snímky , nemusí vyskytovat pouze odpad vhodný jako potrava pro navrhované roboty. Je nutné roboty vybavit systémem, který detailně vyhodnocuje okolí, navíc v reálném čase. K tomu je vhodný právě SLAM. Robot se proto rozhoduje na základě momentálních podmínek. V momentě kdyby se např. v místě vyskytl trosečník, SLAM situaci vyhodnotí a robot se trosečníkovi vyhne a zároveň pošle informaci o trosečníkově pozici. Jelikož roboti pojídají pouze plastové materiály. SLAM navádí roboty pouze k plastům a vyhýbá se přírodním odpadům. Zároveň monitoruje i ostatní roboty (boidy).
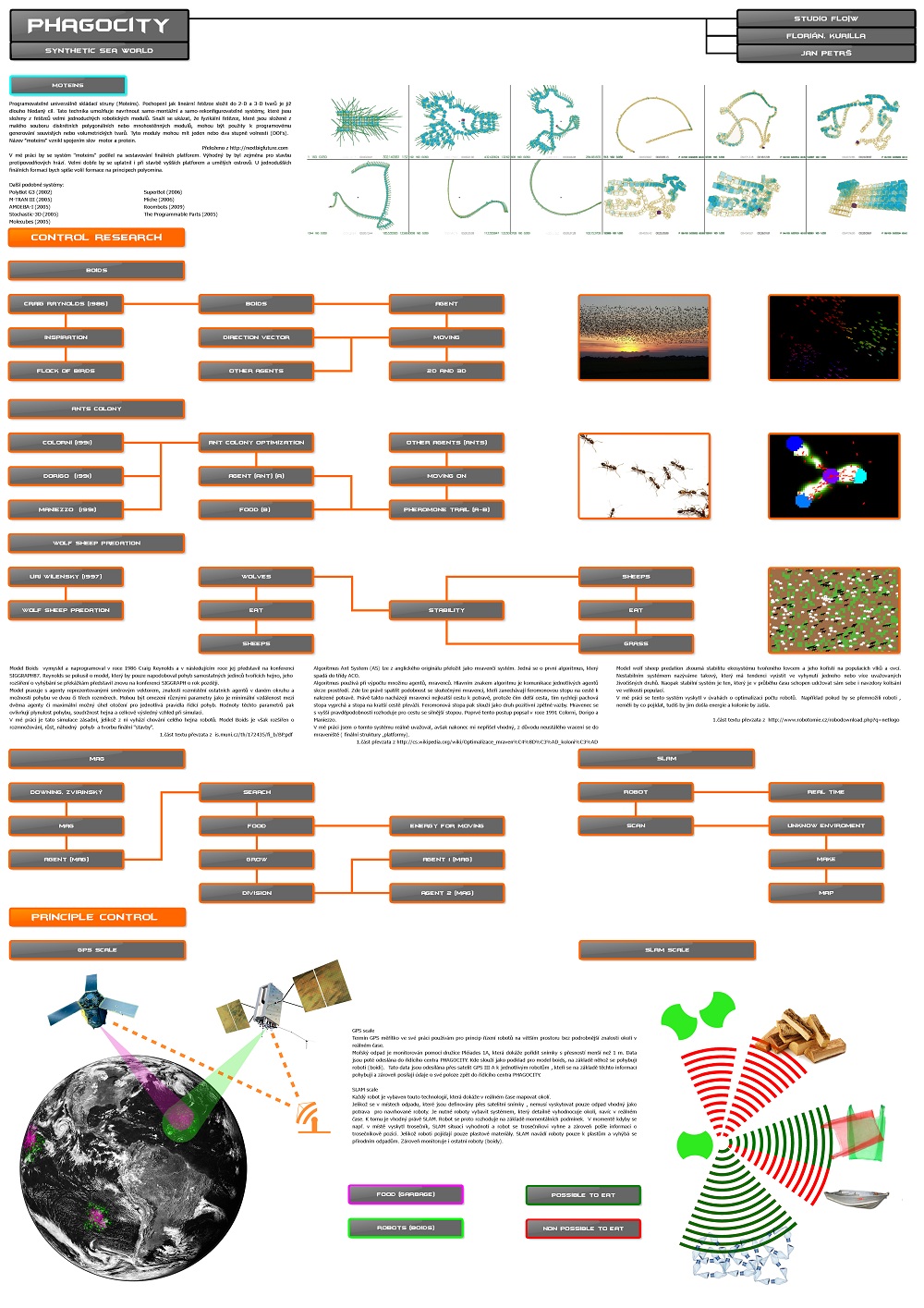
Způsob navádění
GPS měřítko
Termín GPS měřítko ve své práci používám pro princip řízení robotů na větším prostoru bez podrobnější znalosti okolí v reálném čase.
Mořský odpad je monitorován pomocí družice Pléiades 1A, která dokáže pořídit snímky s přesností menší než 1 m. Data jsou poté odeslána do řídícího centra PHAGOCITY. Kde slouží jako podklad pro model boids, na základě něhož se pohybují roboti (boidi). Tato data jsou odesílána přes satelit GPS III A k jednotlivým robotům , kteří se na základě těchto informací pohybují a zároveň posílají údaje o své poloze zpět do řídícího centra PHAGOCITY.
Způsob pohybu
Program simulující chování robotů je vytvořen pomocí skriptovacího jazyka java a programu processing. Jedná se o rozšíření modelu boids o některé další funkce:
1,růst Robot zde reprezentovaný kruhem se zvětšuje o velikost odpadu , který prošel vnitřním procesem robota.
2,dělení Pokud se velikost robota rovná dvojnásobku své původní velikosti, dělí se.
3,přesun do finální struktury Je-li počet robotů větší jak 50 , přesouvají se na místo finální struktury, již se nedělí.
4,finální struktura V mém případě se tvoří jednoduchý tvar pomocí řádků a sloupce.
5,málo odpadu V momentě, kdy je množství odpadu nízké, přestává fungovat hejnování (boids) a nastává random pohyb kvůli efektnějšímu vyhledávání potravy.
6,dostavená struktura=0roboti dojedí okolní odpad a vydávají se na jiné místo.
Ideový návrh robota
viz plachta č. 4
využívám zde práci teamu vedeného p. Goldwaterem. Ta je ovšem rozšířena o funkce: energie mořských vln, replikátor, biodegradace.