Maslovskiy Oleg | Ocean robotic cleaning system
The Great Pacific garbage patch, also described as the Pacific trash vortex, is a gyre of marine debris particles in the central North Pacific Ocean located roughly between 135°W to 155°W and 35°N and 42°N. The patch is characterized by exceptionally high concentrations of pelagic plastics, chemical sludge and other debris that have been trapped by the currents of the North Pacific Gyre.
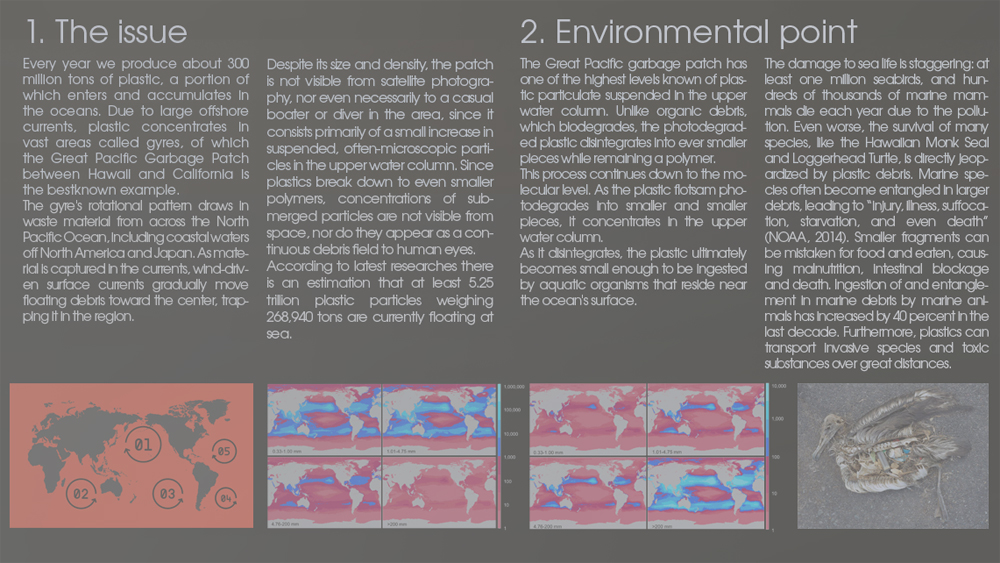
The Great Pacific garbage patch has one of the highest levels known of plastic particulate suspended in the upper water column. Unlike organic debris, which biodegrades, the photodegraded plastic disintegrates into ever smaller pieces while remaining a polymer.
This process continues down to the molecular level. As the plastic flotsam photodegrades into smaller and smaller pieces, it concentrates in the upper water column.
The damage to sea life is staggering: at least one million seabirds, and hundreds of thousands of marine mammals die each year due to the pollution. Even worse, the survival of many species, like the Hawaiian Monk Seal and Loggerhead Turtle, is directly jeopardized by plastic debris.
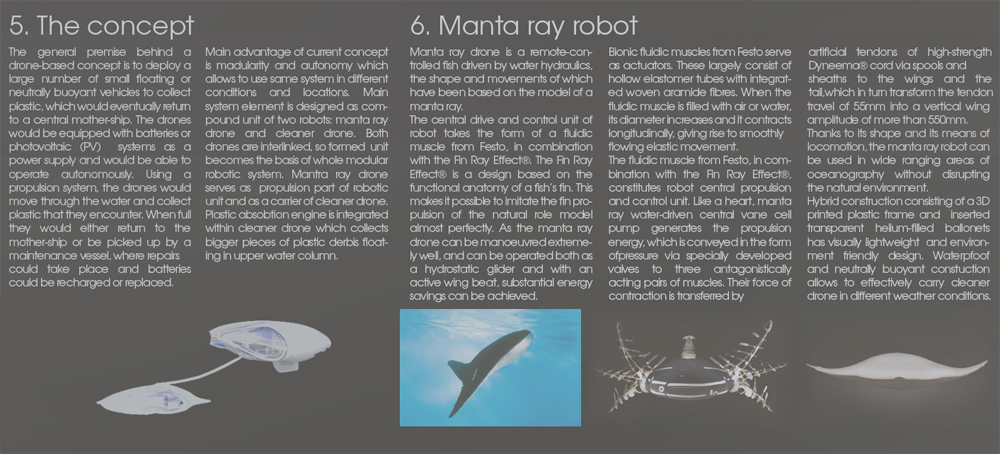
Since the marine plastic pollution problem has become known, many possible solutions have been proposed.The general premise behind a drone-based concept is to deploy a large number of small floating or neutrally buoyant vehicles to collect plastic, which would eventually return to a central mother-ship. Main advantage of current concept is modularity and autonomy which allows to use same system in different conditions and locations.
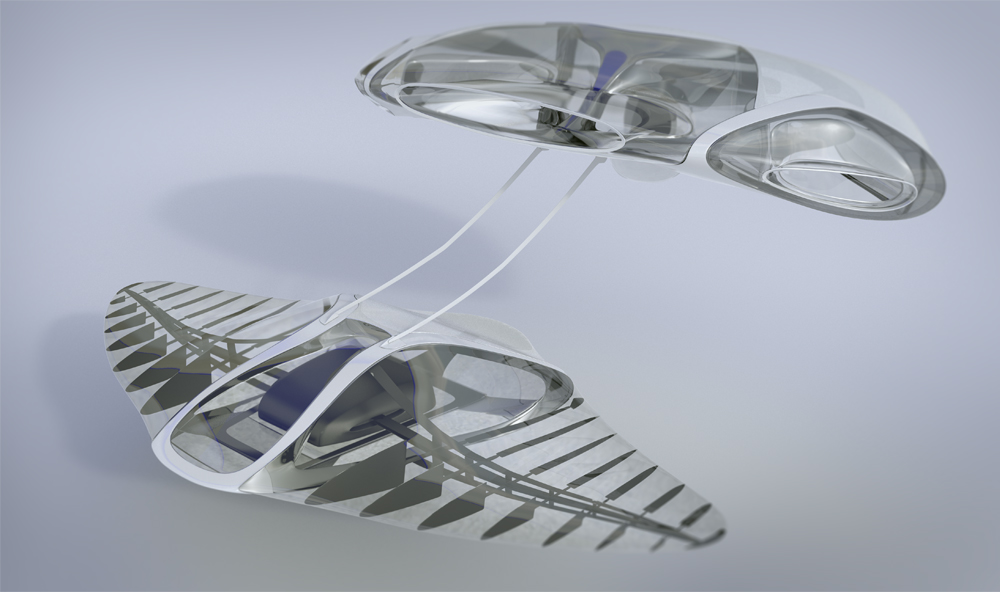
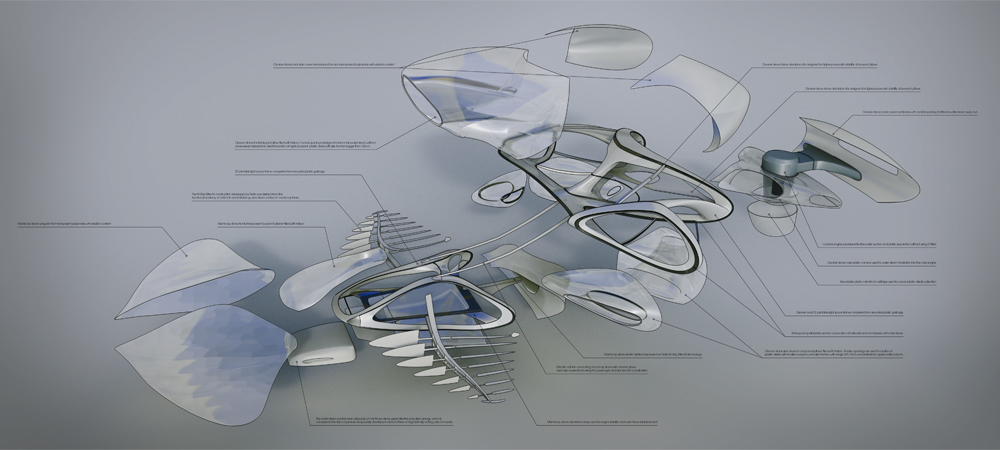
Main system element is designed as compound unit of two robots: manta ray drone and cleaner drone. Both drones are interlinked, so formed unit becomes the basis of whole modular robotic system. Mantra ray drone serves as propulsion part of robotic unit and as a carrier of cleaner drone. Plastic absorption engine is integrated within cleaner drone which collects bigger pieces of plastic debris floating in upper water column.
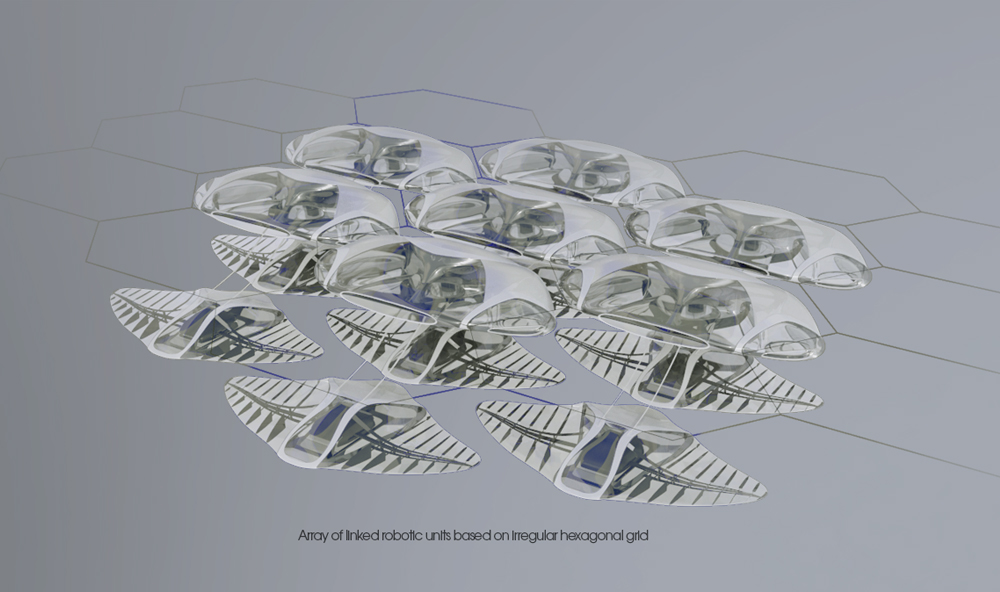
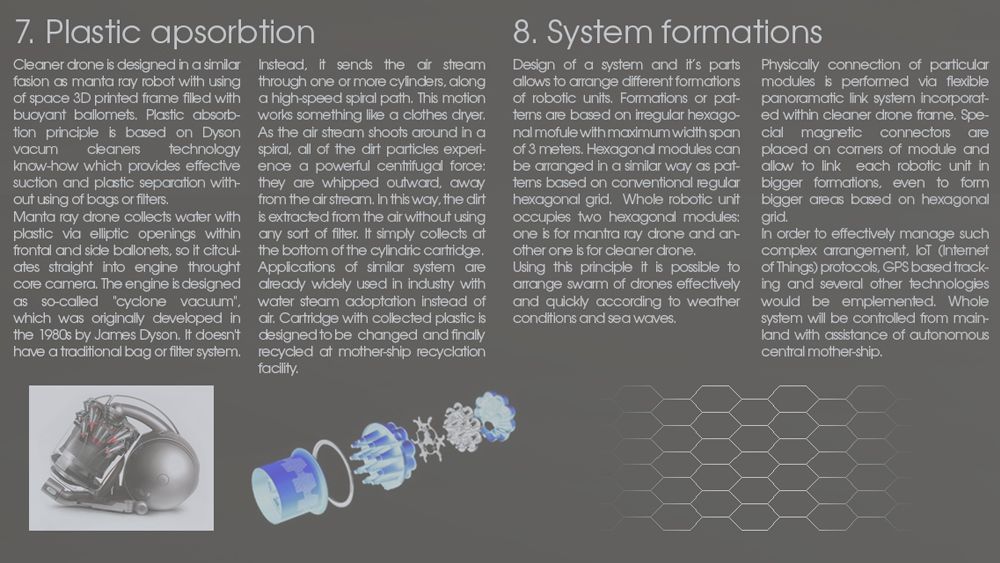
Design of a system and it’s parts allows to arrange different formations of robotic units. Formations or patterns are based on irregular hexagonal module with maximum width span of 3 meters. Hexagonal modules can be arranged in a similar way as patterns based on conventional regular hexagonal grid. Whole robotic unit occupies two hexagonal modules: one is for mantra ray drone and another one is for cleaner drone. Using this principle it is possible to arrange swarm of drones effectively and quickly according to weather conditions and sea waves.
Physically connection of particular modules is performed via flexible panoramic link system incorporated within cleaner drone frame. Special magnetic connectors are placed on corners of module and allow to link each robotic unit in bigger formations, even to form bigger areas based on hexagonal grid. In order to effectively manage such complex arrangement, IoT (Internet of Things) protocols, GPS based tracking and several other technologies would be implemented. Whole system will be controlled from mainland with assistance of autonomous central mother-ship.
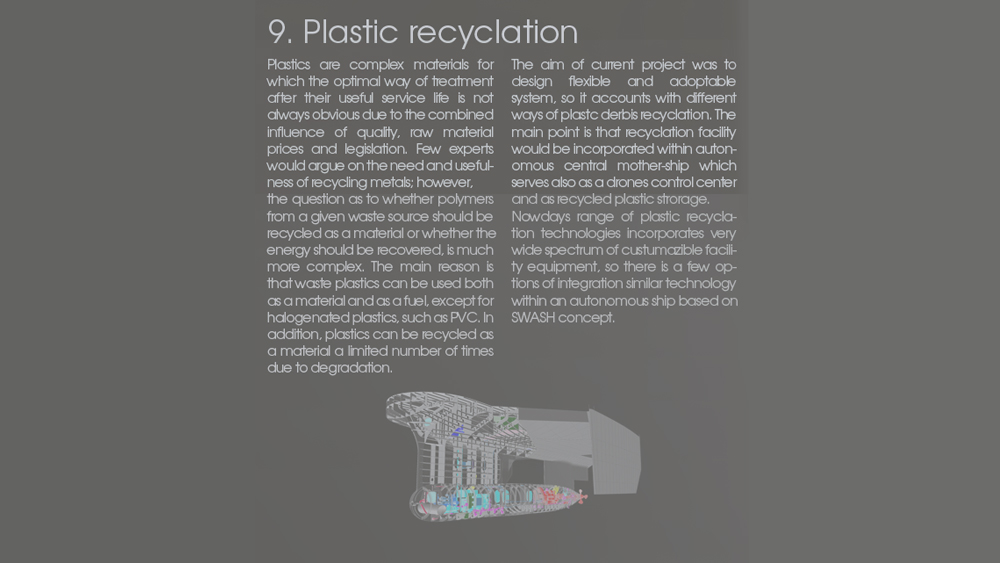
Plastics are complex materials for which the optimal way of treatment after their useful service life is not always obvious due to the combined influence of quality, raw material prices and legislation. The aim of current project was to design flexible and adoptable system, so it accounts with different ways of plastic debris recyclation. The main point is that recyclation facility would be incorporated within autonomous central mother-ship which serves also as a drones control center and as recycled plastic storage.
Nowadays range of plastic recyclation technologies incorporates very wide spectrum of customisable facility equipment, so there is a few options of integration similar technology within an autonomous ship based on
SWASH concept.
|
|