via GIPHY
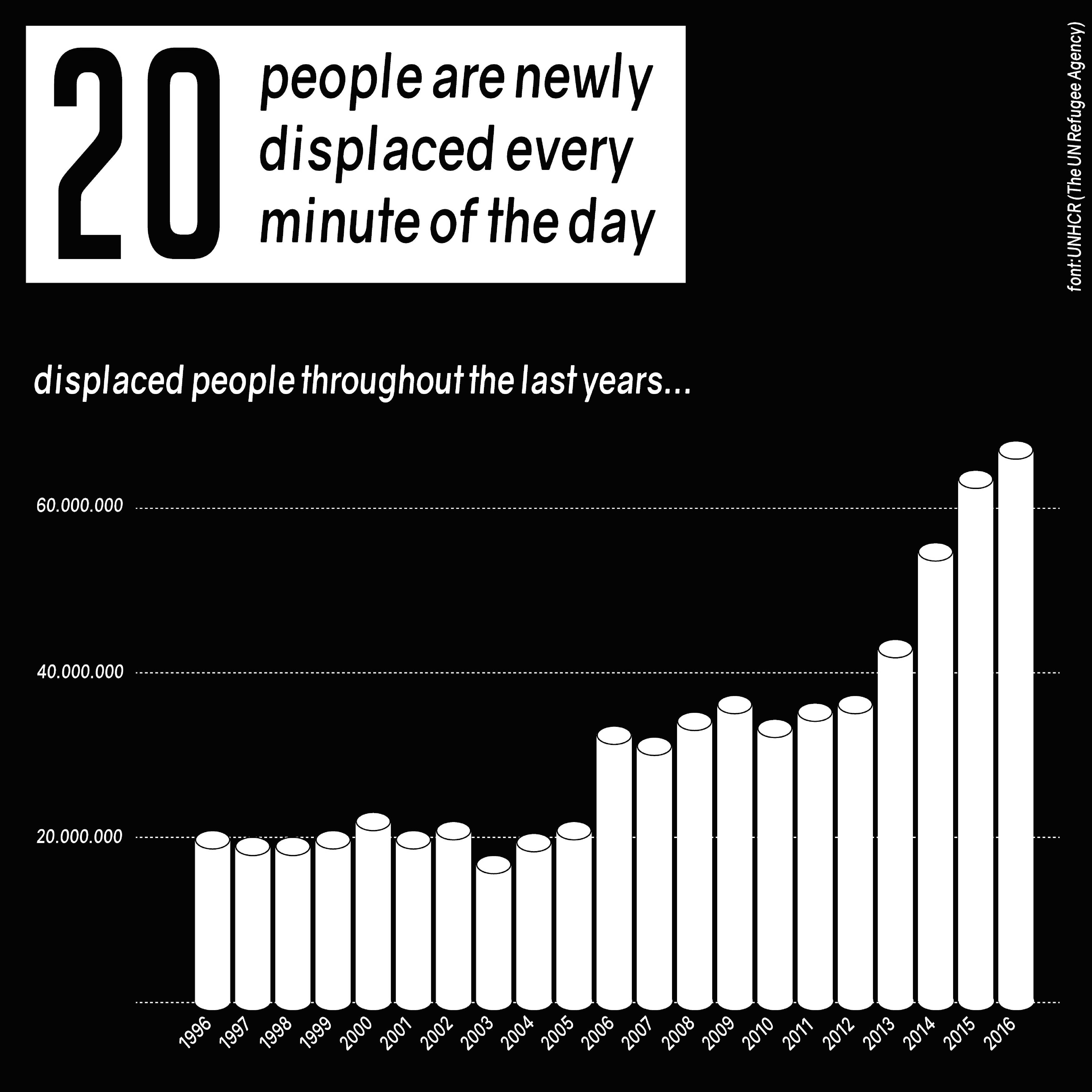
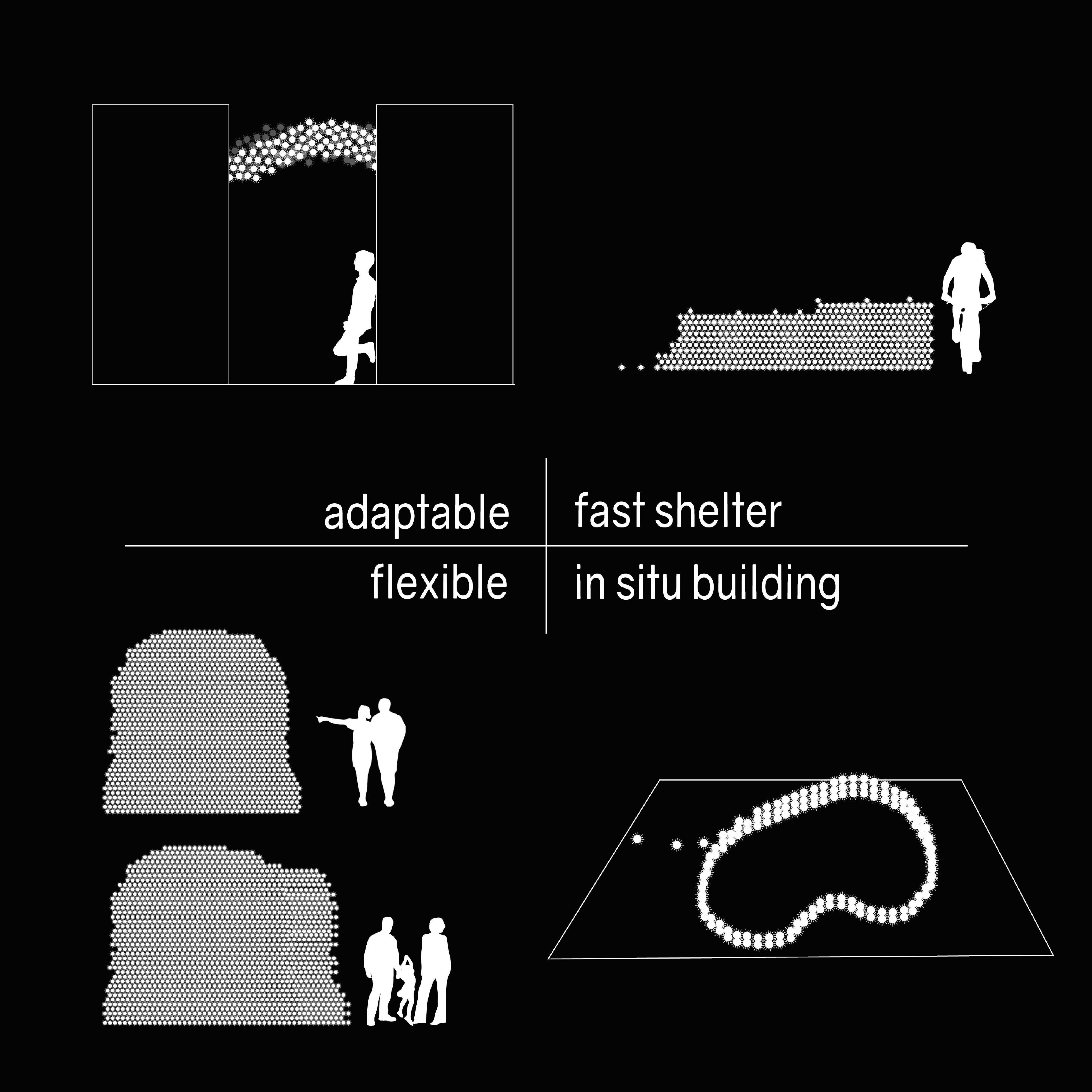
The idea of a robot swarming could both solve rapidly the increasing demands for shelter and change our perception of the possibilities that involve the built space.
Studying the phenomena of swarming, it was possible to recognize that this is an interesting approach for fastly organizing big crowds of separate agents. Diverse types of animals, such as the fire ant in the amazon, swarm in order to protect and dislocate themselves in large numbers.
It is also a simple approach for it doesn’t demand for intelligent parts, but ones that can follow up to uncomplicated commands, considering that the system demonstrates its efficiency. working as a whole.
via GIPHY
For further analysis of the robots’ possible arrangements, geomag magnets were used. This type of study was made in order to assure that the system would work properly not only while dislocating itself, but as a stable unit as well.
The tetrahedron was found to be the most rigid structure to form spacegrids, it is a platonian solid with identical edges. In this configuration, the robots would be equally distanced between each other and allowed diverse combinations and shapes that can derive from this simple polyhedron.
via GIPHY
The grasshopper algorithmic modeling for Rhino was the main tool for computer simulation of the robot unit. With the right script, the simulations of movement and the proportions were achieved throughout the semester.
The software was also essential to make the animations, through the manipulation of simple components the visualization of diverse shapes and sizes of the articulated arms turned out to be more intuitive and accessible media.
via GIPHY
Finally, this project is successful in the meaning it questions the precepts on what and how is made the built environment. It also suggests that for a more dynamic world we might need more dynamic solutions, with technologies that are already available to us but still could be more further explored.
http://scripting.molab.eu/tutorials/swarm-robot-unit-tutorial/